一、GPS 干扰与欺骗的基本认识
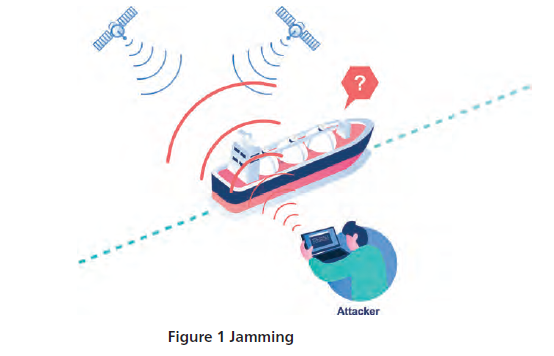
(一)什么是干扰(Jamming)
干扰通常是由全球导航卫星系统(GNSS)频率上的信号干扰引起的。不过,干扰也可能由非故意因素导致,包括空间天气或能够在 L1 频率上辐射信号并干扰 GNSS 信号接收的故障设备。
故意干扰旨在压制非常微弱的 GNSS 信号接收器。除了军用干扰器,个人保护设备(PPD)这类设备也常被使用,它们容易获取且价格低廉,但在大多数国家是被禁止的。一些 GNSS 频段与某些雷达、其他卫星设备以及业余无线电共享,其他来源包括用于飞机导航的测距设备、电视谐波以及故障电子设备。例如,25W 的海事卫星传输在设计不佳的双频接收器附近,至少会 “屏蔽” 所有 GNSS 接收,最坏的情况下会 “烧毁” 接收器前端。
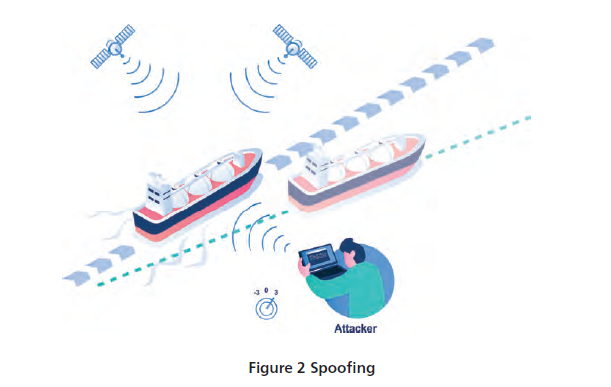
(二)什么是欺骗(Spoofing)
GNSS 欺骗是通过本地传输类似 GNSS 的信号,这些信号经过编码,使接收器误以为自己处于某个位置。
GNSS 欺骗攻击试图通过广播不正确的 GNSS 信号来欺骗 GNSS 接收器,这些信号的结构类似于一组正常的 GNSS 信号,或者通过重播在其他地方或不同时间捕获的真实信号。这些被欺骗的信号可能经过修改,导致接收器估计的位置与实际位置不同,或者位置正确但时间与攻击者设定的不同。
一种常见的 GNSS 欺骗攻击形式,通常称为 “携带攻击”,首先广播与目标接收器观察到的真实信号同步的信号。然后逐渐增加伪造信号的功率,使船只的 GNSS 接收器跟踪虚假信号,进而报告与真实信号不同的位置。旨在不被发现的 GNSS 信号欺骗是军事级技术,目前在和平时期不太可能出现。
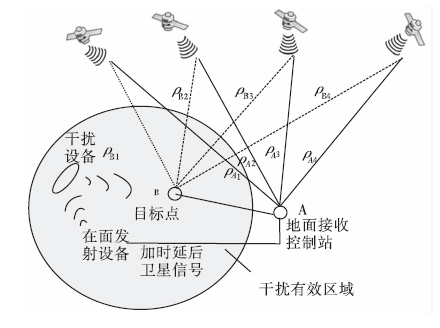
(三)转发干扰(Meaconing)
转发式干扰是一种通过接收敌方雷达/导引头信号,经放大调制后转发形成假目标的诱饵干扰装置。 其利用相干处理增益降低干扰机功率需求,实现干扰样式多变、响应速度快等特点,广泛应用于雷达、通信及GPS等领域。 干扰机主要由接收天线、前置放大器、干扰信号调制器、末级功率放大器及发射天线组成,转发信号可欺骗敌方追踪诱饵。 针对此类干扰,学术界提出了基于能量函数、时频滤波及波形设计的对抗方法
“转发干扰” 是一种欺骗形式,即 GNSS 信号被重新传输,其所需设备比欺骗攻击所需设备更简单。
转发干扰攻击的来源也可能是 GPS/GNSS 中继器,例如安装在机场机库中的那些,用于在室内接收 GPS 信号进行测试。如果这种中继器的功率被有意或无意地增加,就会发送虚假位置。近期一些欺骗攻击报告被专家认为是转发干扰攻击。
二、检测与缓解措施
2017 年,国际海事组织(IMO)发布了 MSC.1/Circ.1575《船载位置、导航和定时(PNT)数据处理指南》,作为多系统船载无线电导航接收器的性能标准。国际电工委员会(IEC)正在基于 IMO 的《船载 PNT 数据处理指南》(MSC.1/Circ.1575)制定多系统接收器的测试规范,包括卫星增强系统(SBAS)以及其他无线电导航系统。
如果船上的设备符合 MSC.1/Circ.1575 规范,并且有多种类型的 GNSS 以及其他输入,系统在检测到错误时应发出警报,通知驾驶员位置丢失。已经存在符合 MSC.1/Circ.1575 指南的现代设备。INTERTANKO 建议船上的导航系统、设备和软件按照这些指南设计。
同时,公司应急措施中对于识别 GNSS 故障、 spoofing 或 jamming 作出了明确规定:
按照 MOM 中的位置验证要求,在 ECDIS 中验证 GPS 位置,可与雷达叠加(近岸时)、雷达 / 目视定位(近岸时)、推算航迹(DR)、估计位置(EP)、先前定位(远海时)、天文定位(远海时)、回声测深仪深度读数与海图对比等进行比对。
启用并监控 ECDIS 中主要和次要定位方法之间的位置偏离警报:在远海(无法使用雷达 / 目视定位 / 叠加)时,按如下设置 ECDIS 的主要和次要定位方法:
并在 ECDIS 中设置主要和次要定位方法之间的位置偏离警报,当主要(如 GPS 1)和次要(如 GPS 2、DR、EP)定位方法之间的差异超过预定义限值时,将发出警告。
3. 监控 GPS 诊断参数,包括精度因子(DOP)和信噪比(SNR)。
三、对驾驶员的指南
(一)检测 GPS 欺骗和干扰的行动
应包括使用雷达和电子海图显示与信息系统(ECDIS)叠加(覆盖或底图),在雷达上可见陆地时,这是识别干扰和欺骗的最佳方法。
按照《安全导航指南》(包括 ECDIS,INTERTANKO 2017)中规定的适当间隔进行位置验证。观察推算航迹(DR)位置(根据陀螺航向和计程仪距离得出的位置)与 GNSS 定位之间的显著差异。在合适的深度区域航行时,使用回声测深仪比较深度进行观察和验证。
(二)检测到干扰和欺骗时的行动
立即行动:
手动选择次要位置传感器。如果有其他 GNSS 输入,使用 “GNSS 差异” 警报检查定位源之间的微小差异。如果次要传感器无法提供船只位置,且没有其他方法输入定位信息,驾驶员应选择 DR 或估计位置(EP)模式。
如果离岸边足够近,开始手动标绘船位,并在可能的情况下寻求更大的海上空间。自动识别系统(AIS)可能也会受到干扰或欺骗攻击的影响,使用时应极为谨慎(这指的是其他船舶的位置可能受到攻击的影响,而非甚高频 AIS 信号)。
注意:AIS 虚拟导航辅助位置是正确的,因为传输的位置是真实的静态位置,并非来自 GNSS 信号。在沿海导航期间使用平行索引法保持安全距离并确定转向点。如果无法确定船只相对于导航危险物的位置,则停船。
情况相对稳定时:
频繁检查船只的 GNSS 位置,以检测服务何时恢复。做 “干扰和欺骗事件报告”
/1/DTG (DATA TIME GROUP)/UNIT LAT/ LONG POSITION AT REPORTING TIME//
/2/TRACK WHILE OBSERVING INTERFERENCES/FROM LAT/LONG-TO LAT/ LONG//
/3/DURATION WHILE OBSERVING INTERFERENCES − START AND END TIME//
/4/INTEFERENCE TYPE (SYSTEMS AFFECTED AND HOW)//
/5/ASSESED DIRECTION OR COVERAGE AREA OF INTERFERENCE//
/6/NAVIGATION – SECONDARY MODES OF NAVIGATION USAGE AND ACCURACY VS GPS SYSTEMS//
/7/COMMUNICATIONS SYSTEMS AFFECTED
/8/OVERALL ASSESSMENT OF OBSERVATIONS – PROVIDE FREE TEXT COMMENT ON THE EVENT AND
ADDITIONAL INFORMATION THAT CAN BE CONSIDERED INTERESTING.
Please submit reports to NSC by email to: info@shipping.nato.int
报告 GNSS 中断或异常。记录关键信息,如实际位置(纬度 / 经度)、日期 / 时间以及中断或干扰的持续时间。在可能的情况下,提供干扰期间设备故障的照片或屏幕截图,以帮助分析人员确定潜在原因。
使用纸质海图的船只:
继续使用替代定位或 DR 标绘。
正常操作期间:
定期检查位置和来源的传感器输入。
驾驶员应熟悉在操作限制要求时更改设置,参见下面的培训部分。
公司应急措施中对于检测到相关情况后的立即行动补充如下:
立即通知船长。
手动选择次要位置传感器并验证位置。
如果次要传感器无法提供船舶位置或发现位置不正确,在 ECDIS 中选择 DR 或 EP 模式作为定位方法。
使用 DR/EP 导航,并通过以下方式定期手动定位更新 DR/EP 位置:近岸时使用雷达和目视方位;远海时使用天文定位。
将回声测深仪深度读数与海图对比。
采用PI。
通知船舶交通服务(VTS)、港口控制 / 海岸当局、公司和指定岸上人员(DPA)。
可能的话,寻求更大的海域。
避开浅滩、关键进港区域等高风险区域。
能见度差或交通密集区域时减速。
4) Inform the Master immediately
5) Manually select a secondary position sensor and verify the position
6) If a secondary sensor is unable to provide vessel’s position or Position is found incorrect
a) Select the DR or EP mode as position fixing method in ECDIS
7) Navigate using DR / EP and update DR / EP position with regular manual fixes from:
Radar and Visual bearings if near to shore
8)Compare Echosounder depth readings against navigational chart
9) Employ parallel indexing techniques
10) Notify:
a) Vessel Traffic Services (VTS)
b) Port control / Coastal authorities
c) Company and Designated Person Ashore (DPA)
11) Seek greater sea room if possible
12) Avoid high-risk areas like shoals, critical approach zones
13) Reduce speed if visibility is poor or in traffic-dense areas
同时需注意:AIS 会受到干扰或欺骗攻击的影响,使用时应极为谨慎(这指的是其他船舶的位置可能受到攻击的影响)。而 AIS 虚拟导航辅助位置是正确的,因为传输的位置是真实的静态位置,并非来自 GNSS 信号。
四、对船东 / 经理的指南
船上的导航设备应遵循 MSC.1/Circ.1575《船载位置、导航和定时(PNT)数据处理指南》。多 GNSS 接收器将增强此类系统。确保所选的 ECDIS 系统具有与上述指南相称的警报管理功能,并制定适当的程序。
使用具有导航消息认证(NMA)的 GNSS 开放信号可以获得进一步的保护。考虑使用罗兰 / E - 罗兰接收器作为弹性系统的备份 / 一部分,以及检测干扰和欺骗的方法(注意:它们没有全球覆盖)。
五、培训
建议定期进行 GNSS 故障演练,以保持处理干扰和欺骗事件的熟练度。演练可包括 GNSS 传感器丢失或故障,以及需要使用手动输入的位置线(LOPS)操作 ECDIS(例如 DR 或 EP 模式,或通过 LOP 或回声参考)等情况。
值班驾驶员(OOW)需要识别受 GNSS 传感器故障影响的其他设备(如 AIS、数字选择性呼叫(DSC)、陀螺和雷达)。当 GNSS 信号恢复正常时,在沿海范围内且有条件的情况下,需要通过手动定位或雷达叠加进行位置交叉检查。
确认后,选择 GNSS 作为主要位置传感器并密切监控。演练的目的是培养检测 GNSS 干扰或欺骗的能力以及独立于 GNSS 的安全导航实践。
六、应对措施
(一)干扰应对措施
幸运的是,有多种缓解策略有助于克服干扰:接收器中的滤波,这对带外信号特别有效,但不幸的是,如果信号直接落在带内,仍可能压制接收器。为接收器配备惯性测量单元(IMU),即使是低成本的 IMU 也会非常有效。
使用自适应天线阵列,受控接收模式天线(CRPAs)对减轻所有类型的干扰极为有效,即使干扰落在 GNSS 频段内。未来可能会出现使用宽带 GNSS 信号(如伽利略 E5 或伽利略 PRS)的先进缓解技术。考虑使用 E - 罗兰接收器作为备份。
关于干扰,各种 GNSS 在不同频率上提供不同的服务。对于开放服务和根据 IEC 61108-3 进行型式认可的海事接收器,频率在 E1 和 E5 位置。使用不同的频率在一定程度上可以减轻攻击的影响,但并不一定意味着系统能在攻击中正常工作。为接收器 / 导航设备配备 IMU 和适当的警报管理计划将大大提高检测攻击的能力。
(二)欺骗应对措施
可行的欺骗应对措施包括使用阵列天线。然而,针对简单的欺骗攻击,监控某些 GNSS 接收器的关键性能指标(KPI)可能会成功,例如监控时钟跳变、异常或不合理的信噪密度比,或代码和载波测量之间的差异。向设备制造商咨询他们的设备如何解决这些问题。使用阵列天线(如 CRPA)有助于减轻干扰和欺骗事件的影响。然而,当考虑到船只拥有多个支持不同功能的 GNSS 天线时,就会出现需要保护哪些天线的问题。是将所有天线都替换为 CRPA,还是使用一个或两个受 CRPA 保护的 GNSS 接收器的数据为所有船舶系统提供 GNSS 数据?答案并不简单,成本可能成为一个问题。
此外,加密技术可能有效。某些类型的 GNSS 很快将提供导航消息认证(NMA),其中包含一些欺骗者无法生成的信号部分。
其他措施也存在,但需要软件和硬件支持(例如,软件:ECDIS 系统,硬件:GNSS 接收器)。这些措施包括:使用自适应天线阵列;飞轮算法,防止系统在 GNSS 接收器(ECDIS 或外部 PNT 软件)中立即出现位置和时间跳变;限制(位置)跳变 ——GNSS 接收器;为接收器配备 IMU,即使是低成本的 IMU 也会非常有效;在可用的情况下,考虑使用罗兰 / E - 罗兰接收器作为弹性系统的备份 / 一部分。
(三)转发干扰应对措施
针对转发干扰(即使用中继器),适用与欺骗类似的应对措施。唯一的例外是,加密技术(即加密导航消息、通过加密方式生成扩频码和 NMA)并不总是有助于对抗转发干扰,这取决于接收器的架构和抗重放功能。这是因为与欺骗攻击不同,中继器不需要知道它所转发的 GNSS 信号的结构。
七、长期行动
公司应急措施中规定了长期行动,具体如下:
频繁检查船舶 GNSS 位置,以检测服务何时恢复。
记录关键信息,如实际位置(纬度 / 经度)、日期 / 时间以及中断或干扰的持续时间。
在干扰期间提供设备故障的照片或屏幕截图,以协助调查和确定潜在原因。
14) Check the vessel GNSS position frequently to detect when the service is available again
15) Take note of critical information such as the actual location (latitude / longitude), date / time and the duration of the outage or disruption
16) Provide photos or screenshots of equipment failures during a disruption to assist in investigating and identifying the potential cause
八、干扰和欺骗事件报告
有几个系统允许船只和管理人员报告问题以及疑似干扰和欺骗攻击。国际工作组 IDM(干扰检测和缓解任务组)已成立,以协调国际社会在检测和报告干扰和欺骗方面的努力。它尚未建立国际报告机制,但这样的系统可能会在未来建立。
(一)GPS 问题报告
美国海岸警卫队导航中心(NAVCEN)欢迎有关服务降级、中断或其他事件或异常的报告。所有个人数据都将保密,仅在需要更多信息或需要进一步澄清时使用。
报告事件时,要求提交的内容尽可能完整。NAVCEN 建议在报告 GPS 问题之前遵循以下步骤:
重置设备,即关闭再打开设备电源;
确认 GPS 设备或 GPS 应用程序的设置;
参考设备手册;
更新设备软件或固件以及 GPS 地图软件;
联系设备制造商寻求额外帮助;
有关更多信息,请参考 GPS 常见问题页面。
如果 GPS 设备将人们引导到错误的地址或以其他方式引导到错误的位置,该问题很可能不是 “GPS” 问题,而极有可能是地图问题。要向 NAVCEN 提交报告
(二)伽利略事件报告表
欧洲 GNSS 服务中心(GSC)欢迎有关伽利略系统性能降级、中断、干扰或任何其他事件的报告。输入的信息将被处理,事件将被调查。提交需要一些必填字段,但所有个人数据都将保密,仅在需要更多信息或需要进一步澄清时使用。报告事件时,要求提交的内容尽可能完整。
(三)事件跟踪:北约
由于和平时期 GPS/GNSS 干扰必须被视为对导航安全的威胁,各自的海军区域协调员负责发布警告并跟踪事件。北约关注网络安全,并请求协助报告,以便构建这一活动的全面情况并评估在 maritime 领域的影响。北约航运中心(NSC)仍然是商船和航运公司的联络点。请报告以下内容:
1.日期时间组(DTG)/ 报告时的单位纬度 / 经度位置;
2. 观察干扰时的航迹 / 从纬度 / 经度到纬度 / 经度;
3. 观察干扰的持续时间 —— 开始和结束时间;
4. 干扰类型(受影响的系统及方式);
5. 评估的干扰方向或覆盖区域;
6. 导航 —— 使用的次要导航模式及其与 GPS 系统相比的准确性;
7. 受影响的通信系统;
8. 观察结果的总体评估 —— 提供关于事件的自由文本评论以及可被认为有趣的其他信息。
请通过电子邮件向 NSC 提交报告:info@shipping.nato.int,或发送至北约航运中心,大西洋大厦,诺斯伍德总部,英国,电话:+44 (0) 1923-956574,传真:+44 (0) 1923-956575。
九、GNSS 类型
GNSS 是一个全球性的位置、时间和速度无线电测定系统,包括空间、地面和用户部分(IMO A.915)。对于 maritime 用户,船级社将认可符合全球无线电导航系统(WWRNS)定位设备搭载要求的 GNSS,即 IMO 决议 A.1046(27)全球无线电导航系统(WWRNS)。GNSS 类型包括美国的 NAVSTAR 全球定位系统(GPS)、俄罗斯的全球导航卫星系统(GLONASS)、欧洲的伽利略系统和中国的北斗导航卫星系统。
GNSS 的性能通过四个标准评估:
准确性:接收器测量的位置、速度或时间与实际值之间的差异;
完整性:系统提供置信度阈值的能力,以及在定位数据出现异常时发出警报的能力;
连续性:系统不间断运行的能力;
可用性:信号满足上述准确性、完整性和连续性标准的时间百分比。

(一)美国的 NAVSTAR 全球定位系统(GPS)
全球定位系统(GPS)是美国拥有的公用事业,为用户提供定位、导航和定时(PNT)服务,具有全球覆盖范围。美国空军开发、维护和运营空间和控制部分。有一个名为 IIIA 的现代化计划正在进行中,第一颗卫星计划于 2023 年发射并完成。这很重要,因为 GPS III 将广播 L1C(与伽利略 E1 共同的信号)。该系统还预计将开发导航消息认证(NMA)服务(见后面关于导航消息认证的部分)。
(二)俄罗斯的全球导航卫星系统(GLONASS)
GLONASS 是一个基于空间的卫星导航系统,在无线电导航卫星服务中运行。它提供了 GPS 的替代方案,是第二个具有全球覆盖范围和相当精度的导航系统。GLONASS 卫星设计经过了多次升级,最新版本 GLONASS-K2 计划在不久的将来投入使用。GLONASS 使用所谓的频分多址(FDMA)方法,而 GPS 和伽利略使用码分多址(CDMA)技术。然而,正在进行的现代化计划也将包含 CDMA。
(三)伽利略 —— 欧洲全球卫星导航系统
伽利略是欧洲的 GNSS,在双频使用方面提供改进的服务。伽利略近年来取得了重大进展,目前已投入使用,并将在 2020 年实现全球覆盖。该计划旨在与所有现有和计划中的 GNSS 兼容。
船长 刘竹元

10-13 来源: 连云港海事

07-02 来源:厦远船员管理
10-04 来源:信德海事网 郭建平
08-02 来源:信德海事网
06-07 来源: 海丰保险

01-19 来源:信德海事网
08-10 来源:信德海事网

07-24 来源:信德海事网
08-25 来源:雪球

10-20 来源:郝秋伟 船长